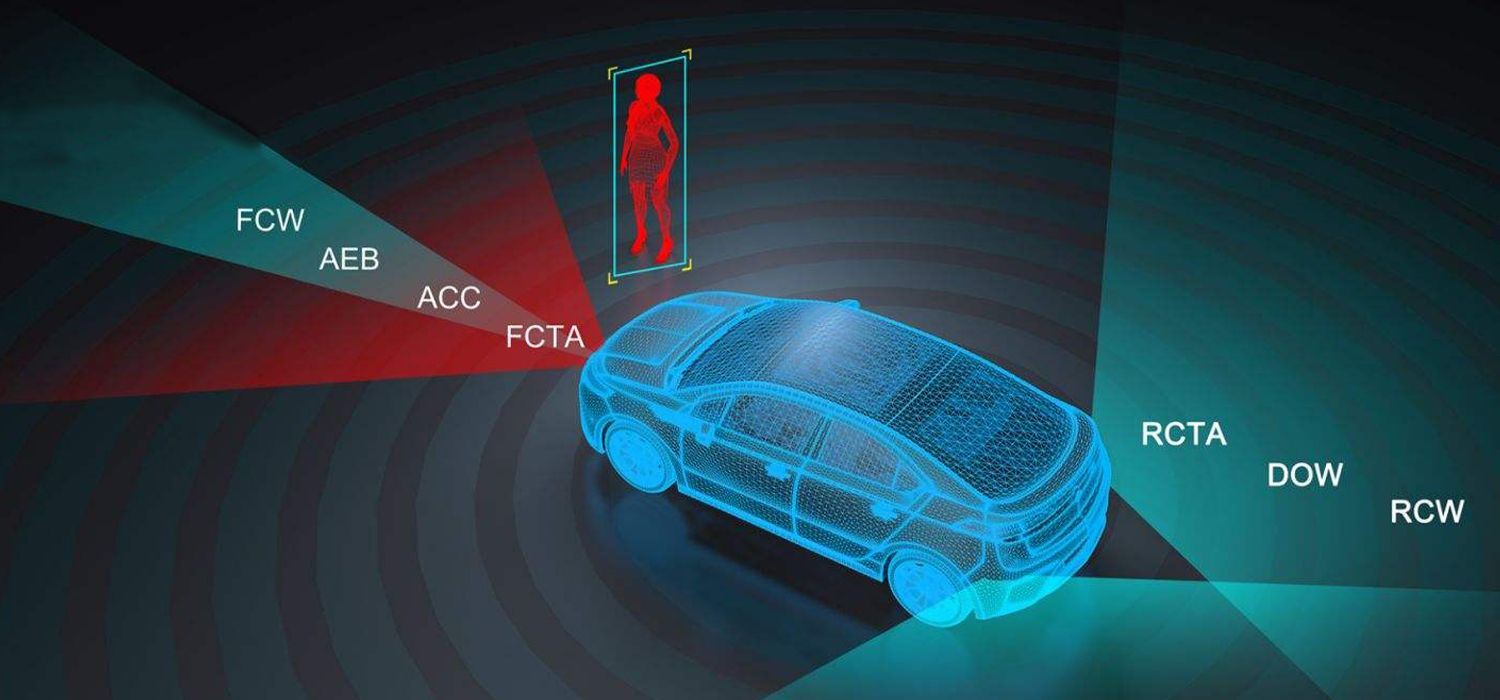
【车讯网 报道】智能驾驶作为当下汽车圈的热门发展方向,承载着很多人对未来出行领域的向往,在这个话题下方的议论,往往少不了车规级芯片、摄像头、激光雷达等词汇,今天我们就一起来聊聊,这些让车辆实现智能驾驶所用到的硬件。
现在以智能驾驶为主打卖点的车辆,不装十个八个摄像头、一两个激光雷达,N个毫米波雷达和超声波雷达,都不好意思说自己是一辆带智能驾驶功能的汽车。但凡事也有例外,特斯拉就一直推崇纯视觉化的智能驾驶,通俗点说就是全车只有摄像头,没有激光雷达、毫米波雷达之类的硬件。
车规级摄像头像素不如手机?
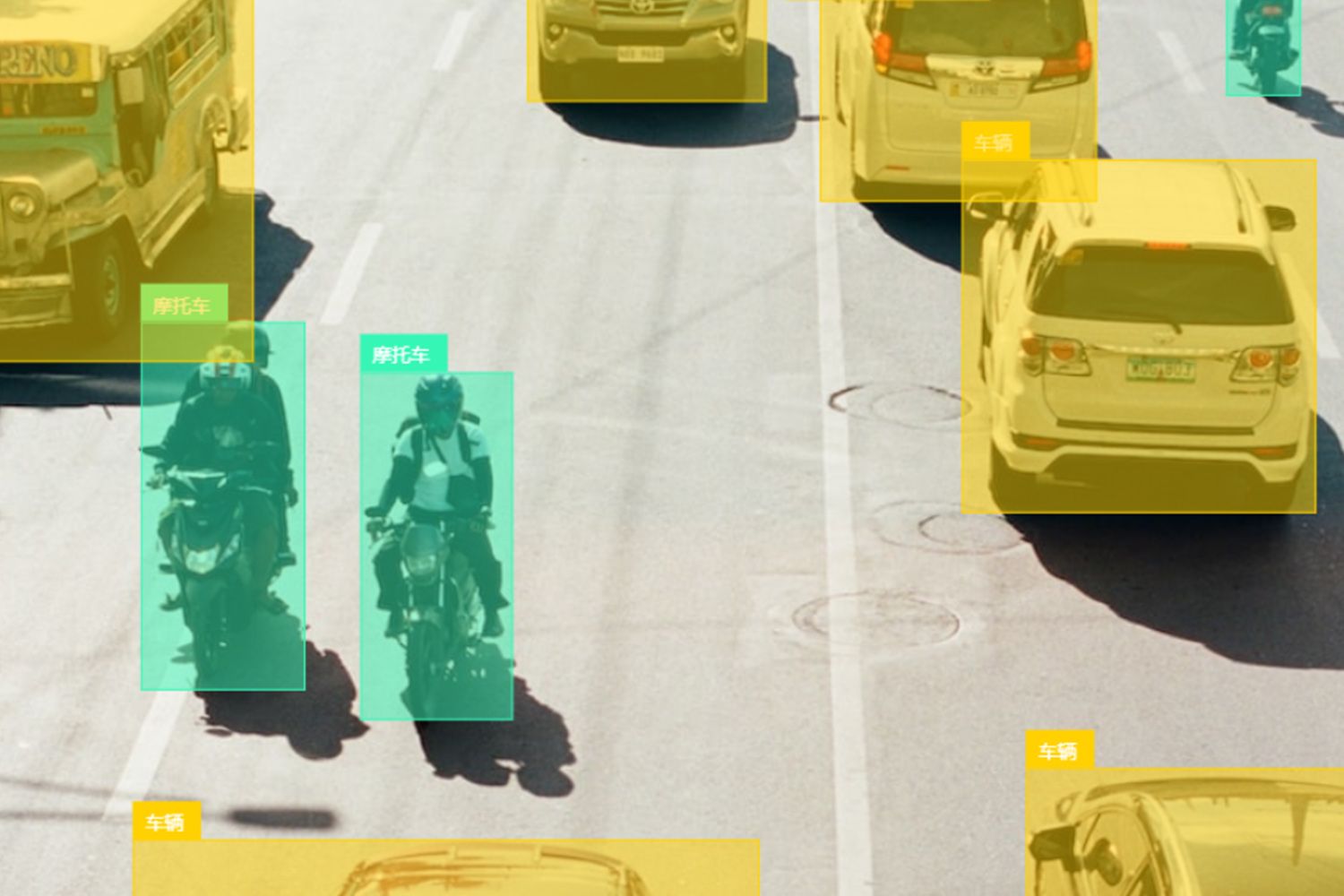
在这些传感器元件中,大家平时接触较多的当属摄像头了,像手机、监控等都配备有摄像头。作为视觉类传感器,用于收集智能驾驶所需道路信息的车规级摄像头,相对车辆上的其它传感器有着价格相对低廉的优势,同时它在收集道路信息的同时,还能对文字、颜色等进行识别。

经过多年技术的更新迭代,手机摄像头的像素如今已经达到了1亿,反观车规级摄像头像素却徘徊在500万、800万左右,此时可能就有同学提问了,一辆车可比一部手机贵多了,为啥不用1亿像素的车规级摄像头?造成这样的局面主要是出于可靠性,以及技术、算力等方面的受限。

我们都知道手机拍视频时是可以进行人脸识别追踪的,但这种程度的识别技术和车规级摄像头相比,那真的就是小巫见大巫了。
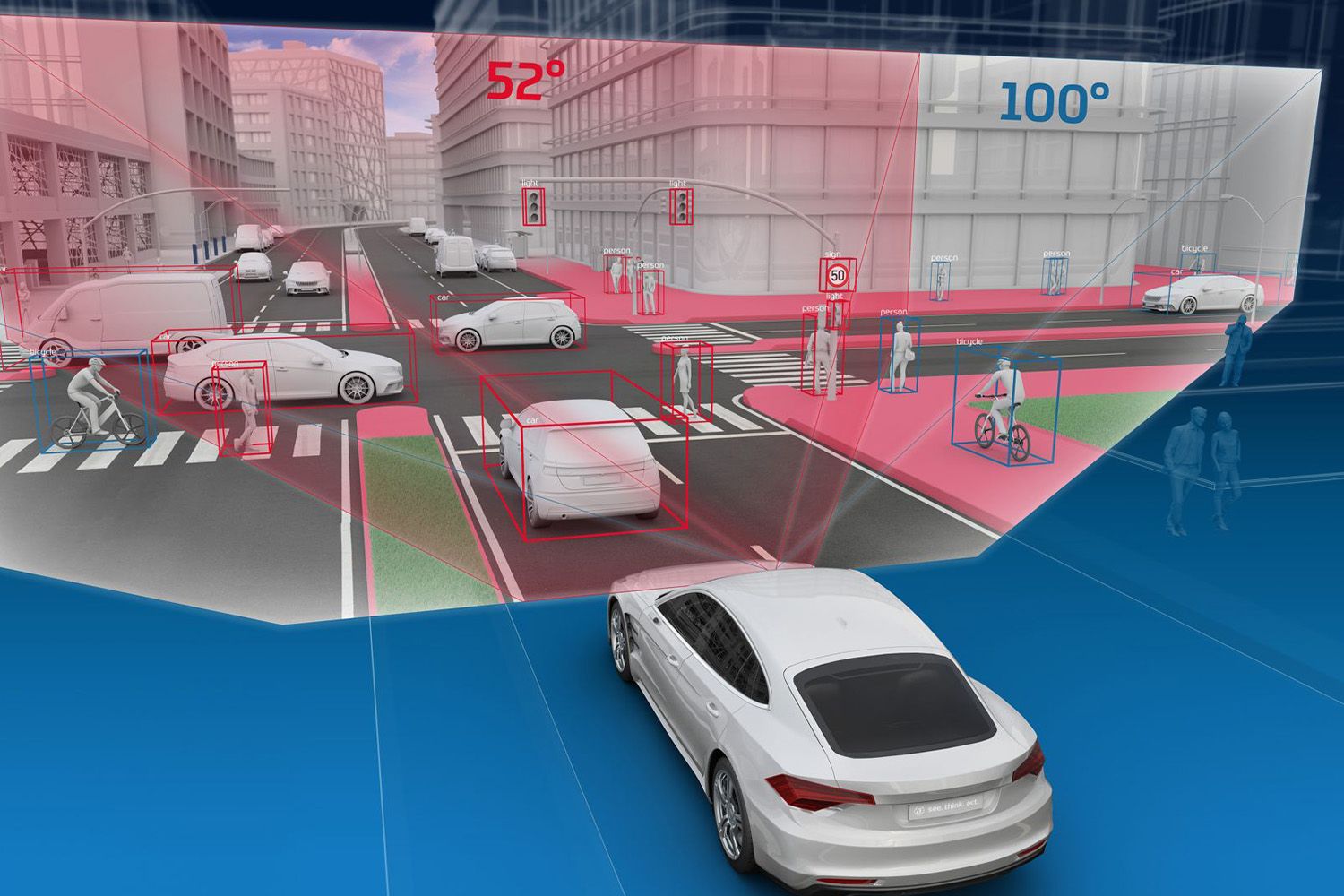
车规级摄像头根据用途的不同,其焦距也是不相同的,比如有些长焦远距摄像头的感知距离可以达到300米,在这300米的可视范围内存在的车辆、行人、车道线、道路标识,以及各种各样的障碍物等,这些都需要被扫描识别并传输到数据处理库中的。
如此庞大的数据量需要被一一处理,车规级摄像头的像素越高,那么所采集的信息就需要更高的算力去解析,假如智能驾驶辅助系统的芯片算力不给力,整个信息处理过程较慢产生了延迟,考虑到汽车在高速行驶时几十米每秒的移动速度,仅仅是0.1秒车辆就有可能撞到前方的障碍物上,有着非常大的安全隐患。
这就像是80斤的姑娘去和280斤的大胃王比拼,两个人喝掉1杯200ml牛奶的时间可能没有太多差距,但面对满满一桌子40杯200ml的牛奶时,80斤的姑娘显然需要更多的时间去喝完。其中80斤、280斤可以看作是芯片算力,1杯和40杯分别是低、高像素车规级摄像头所识别收集的图片数据量。
作为视觉类传感器,摄像头采集的信息本质上来说属于是二维画面,不能直接测算出前方物体的距离、运动状态等信息,所以除了个性十足的特斯拉外,其它车企基本上都不会在车辆上仅仅使用单一的视觉传感器。
望闻问切不如做个“X光”?
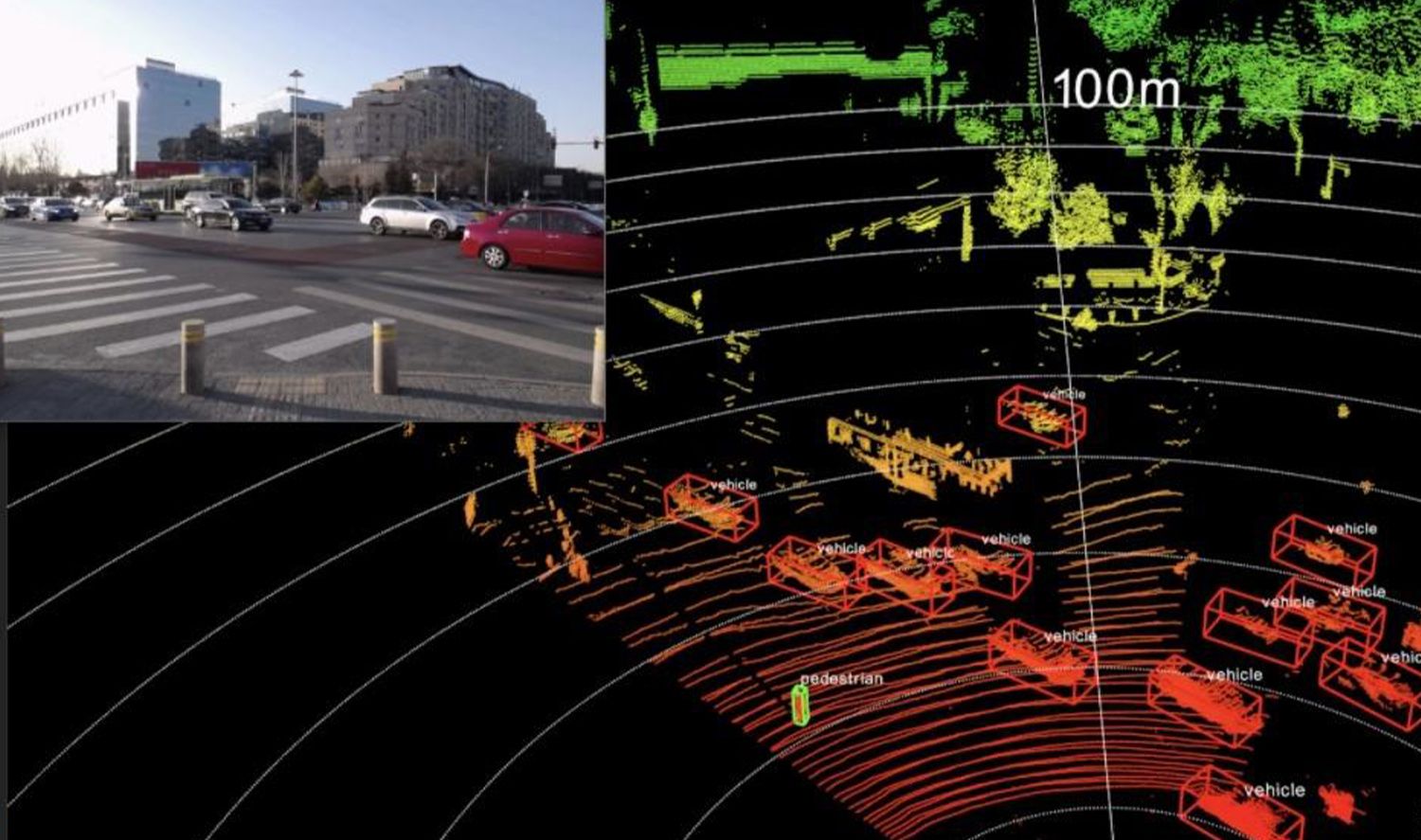
在当下智能驾驶所使用的多种感知类传感器中,如今车载激光雷达的热度是最高的,同时它的价格也是多种传感器里最贵的。激光雷达的工作原理是先向目标物体发射探测激光束,然后再通过接收反射回来的激光束进行分析处理后,得出目标的方位、距离、运动状态等信息。

它和摄像头相比,其优势在于不受光线等环境因素的干扰,能精确识别出车辆前方物体的方位、距离、运动状态等信息,最终在数据库中构建出物体完整的3D模型。
这就像是去医院看病,医生只能通过望闻问切的方式简单了解下病情,如果病人的病情非常严重,就需要用X光、CT等仪器进行深度检查,才能明确的知道生病的根源在哪里。其中望闻问切代表的是摄像头,X光、CT等仪器则代表激光雷达、毫米波雷达、超声波雷达等传感器。

激光雷达的应用最早可追溯到1961年的休斯飞机公司,经过几十年的更新迭代,机载激光雷达的技术已经非常成熟了,不过作为普通乘用级别的汽车,从多方面考虑自然不会使用飞机上那套激光雷达。
首先从安全方面来说,激光雷达是以激光器为辐射源的雷达,如果人体长时间被高功率激光束照射会造成不同程度的辐射伤害。
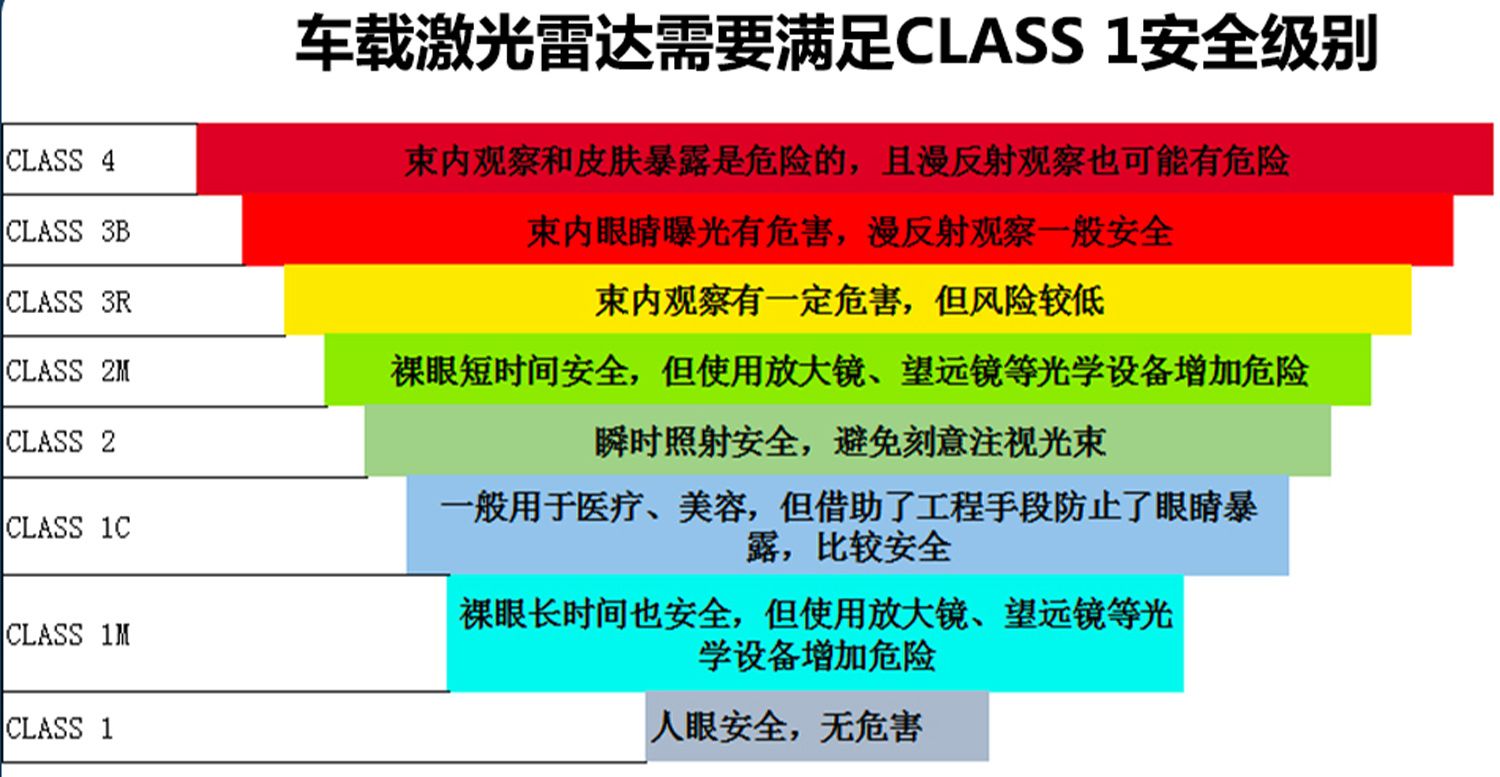
作为在道路上行驶的车辆,它所搭载的车载激光雷达发射的激光功率对人体能造成伤害的话,满大街的行人岂不是要遭殃?所以根据相关部门的要求,车载激光雷达的激光功率要控制在CLASS 1的安全级别,即对人眼不能造成危害,一般来说车载激光雷达的探测距离在200米左右。
再者是集成度和成本,一辆车和一架飞机相比要小的多,所以车载激光雷达在体积上要满足易安装的需求,同时也要符合企业的成本控制要求。所以满足在高温、低温、冲击、震动、水淋等环境下,仍然保证正常工作的可靠性和稳定性,同时身材娇小的车载激光雷达也就顺势而生了。
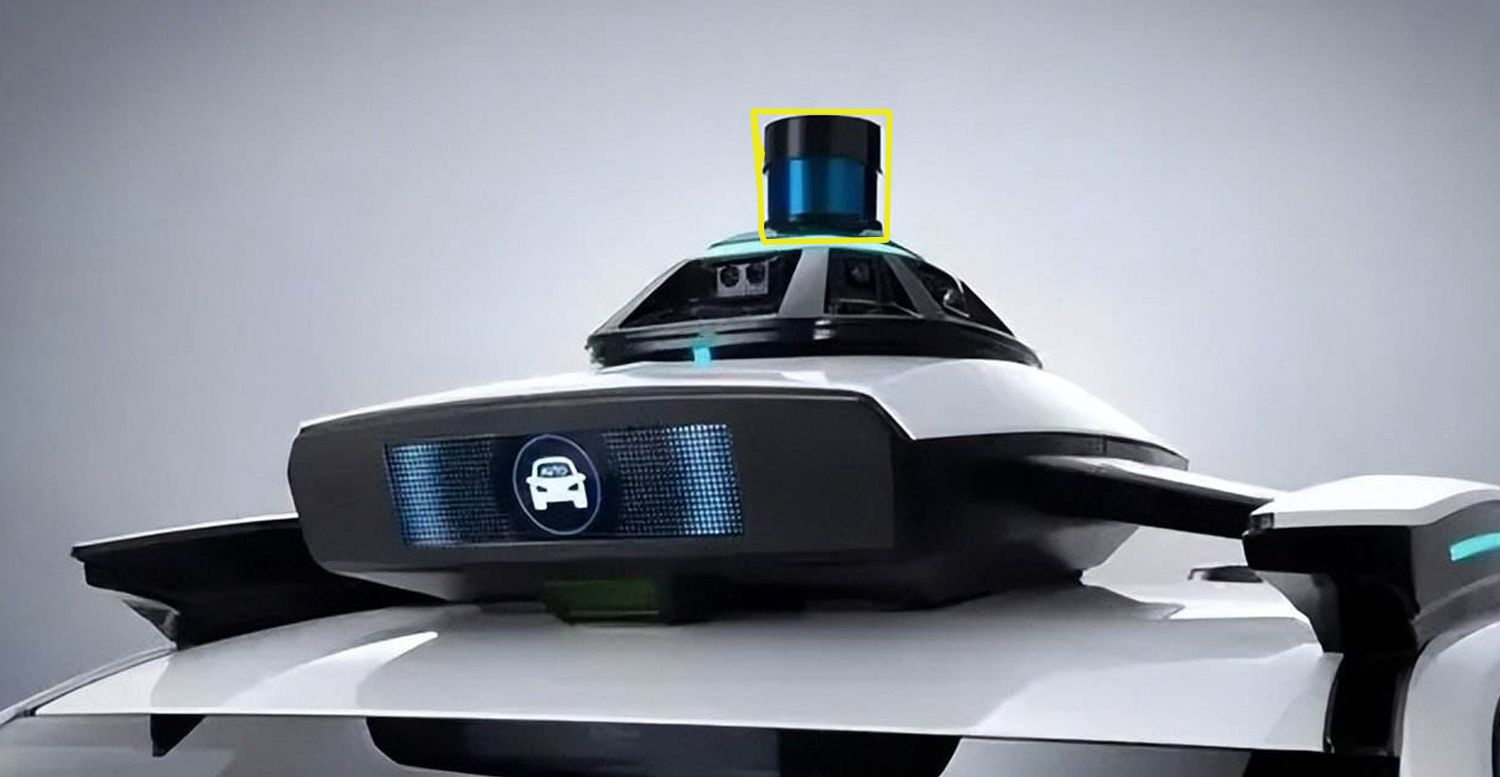
如果你在马路上看到一辆智能驾驶测试车,它的顶部固定有一个圆柱型的遮罩,那么它搭载的便是机械式激光雷达。机械式激光雷达内部的激光发射器,可以通过旋转的方式对车辆周边360度的环境进行扫描识别,虽然这种方式获取的信息量更丰富,但由于它的体积过大、成本高昂的原因,在量产车上很少看到它的身影。
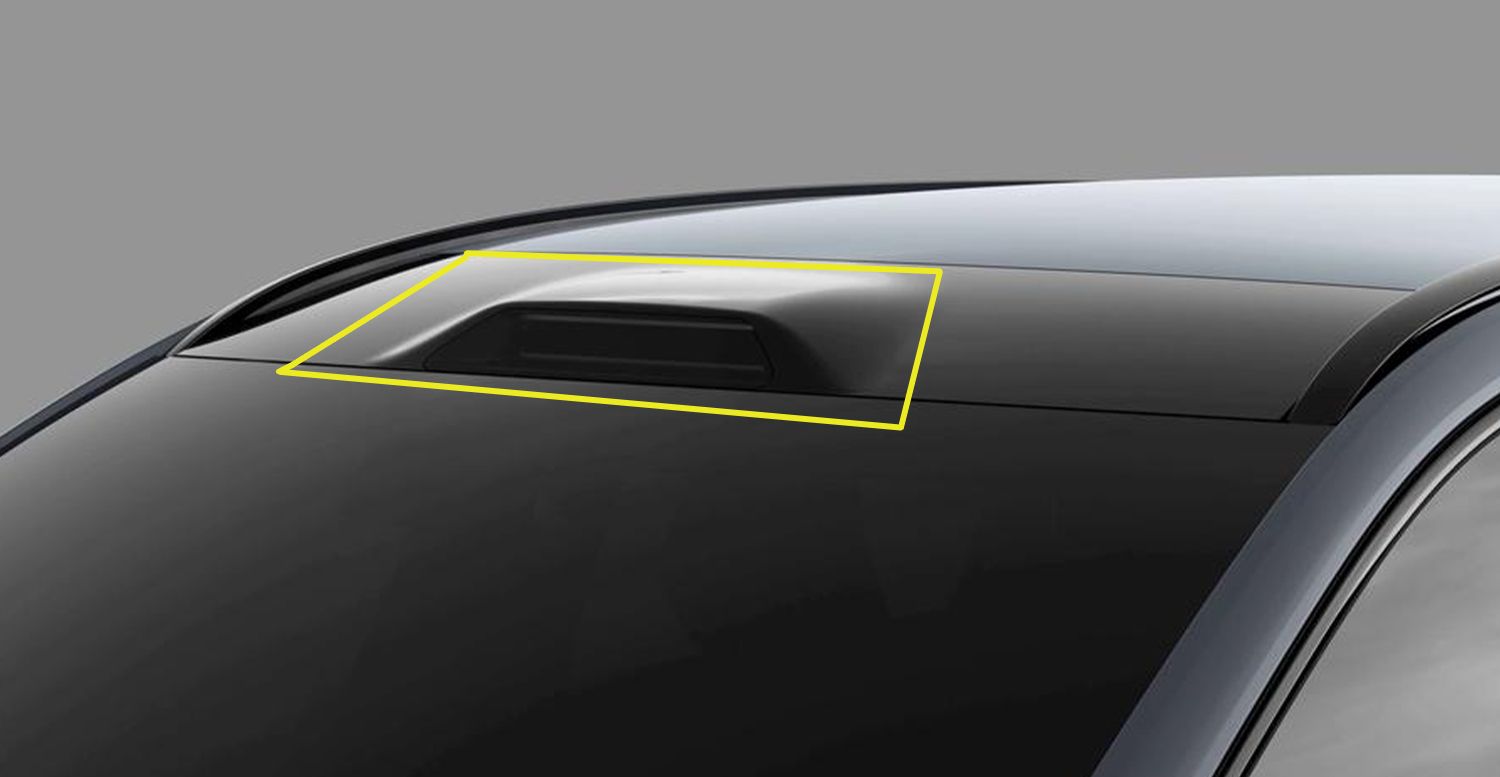
成本相对低廉、体积更小的固态/半固态激光雷达,是当下量产车上能够见到的激光雷达类型。因为整体的体积较小,它们的安装形式也有了更多的选择,以禾赛科技的AT128为例,它的长宽高分别为13.7*11.2*4.7厘米,可以安装在车头、车尾、前风挡上方、翼子板等区域,根据车辆造型的不同安装在不同的部位,并且稍加设计就能很好地将其隐藏起来。
但有利也有弊,固态/半固态激光雷达为了追求小体积、低成本,其内部不再具备可360度旋转的激光发射器,所以搭载这类激光雷达的车辆,其使用数量一般都是不止1个,否则很难对车辆周边360度的环境进行扫描识别。
老司机们的老朋友是它!
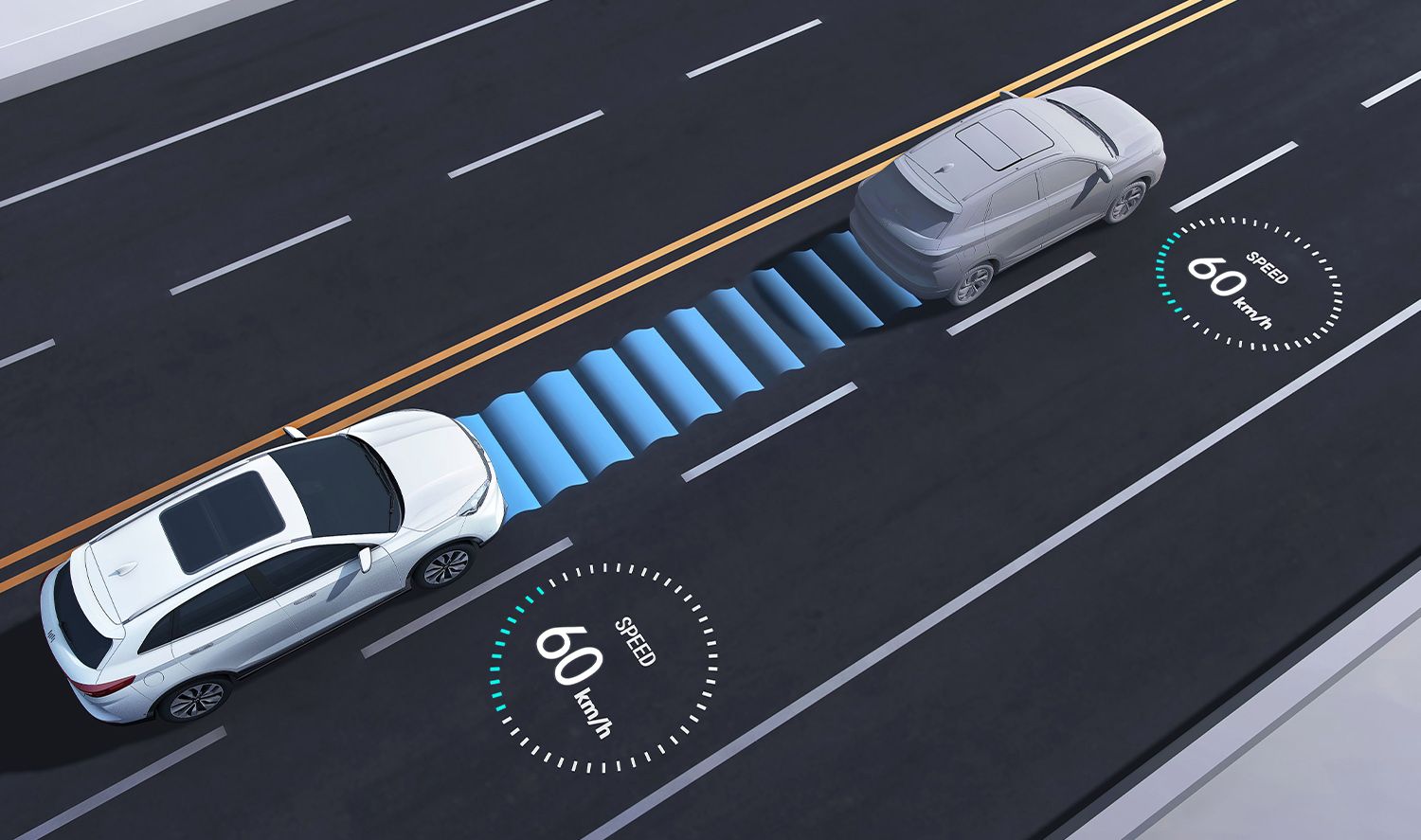
车规级毫米波雷达,这个名字可能听着陌生,但它可是大家的老朋友了。在智能驾驶的概念还没有当下火爆之前,大部分车辆是没有摄像头、激光雷达这类配置的,但是以前的车辆仍然能支持ACC自适应巡航等功能,其中的大功臣便是车规级毫米波雷达。
车规级毫米波雷达的探测距离也在200米左右,它主要是用来测量本车和前方道路上车辆、行人,或者是障碍物的距离,还兼并着测算本车和前方物体相对运动速度的功能。细心的朋友可能会发现,在车辆开启ACC自适应巡航之后,有些车辆会显示出本车和前方车辆的距离。
因为价格相比激光雷达较低廉,千元左右的成本使其有着极高的装车率,这点可以参考当下拥有ACC自适应巡航等功能的车型数量,近些年新上市的车型大多数都具备这项功能。
因为毫米波雷达自身具备极强的穿透性,所以它的安装区域多在车标LOGO、防撞梁内部,有些也直接裸露在车头进气格栅下方区域。
倒车请注意!
车规级超声波雷达大家听着可能也有些陌生,那咱们来换个说法,说起倒车雷达是不是瞬间就有种熟悉感了?当需要倒车时,或者附近有行人靠近车辆周边,系统会发出急促的“滴滴”声来警示驾驶员,这些都是车规级超声波雷达辛勤工作的成果。

从体积上说,它与激光雷达、毫米波雷达相比非常小巧,价格上和二者相比可以说是“白菜”价了,所以现在大多数车辆不仅标配有这项配置,而且搭载的数量也是非常多,一般都在10颗左右。
成本便宜是因为它的探测能力相对较弱,和动辄100米、200米的激光雷达、毫米波雷达相比,车规级超声波雷达的探测范围一般在15~500厘米之间,距离过远的话其探测能力也会随之变弱。

如果仔细观察的话,可以看到在车辆车头、车尾的下半区域会有好多个小圆点,其面积大约和矿泉水瓶盖大小相仿,这些便是车规级超声波雷达。
活体检测?夜视功能?
除了这些汽车市场中常见的智能驾驶传感器,其实还有一种以红外摄像头组成的热成像传感技术,它通过探测物体向外界辐射的热量,能识别判断车辆周边如行人、宠物狗等物体。
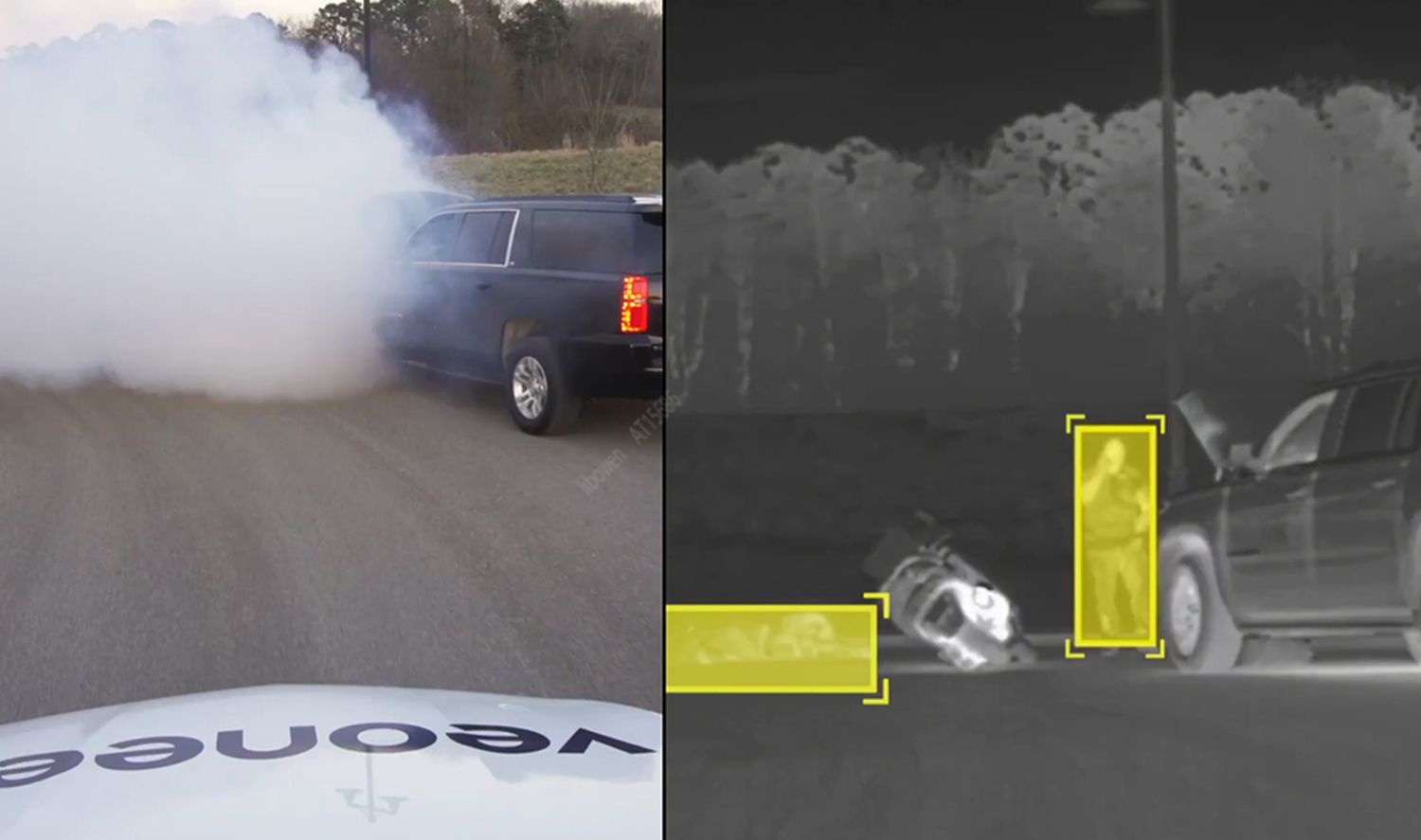
热成像传感器和纯视觉摄像头相比,即便在是浓浓的大雾中,它也能识别出隐藏在浓雾中的各类物体,不会因为恶劣的天气出现“罢工”的情况。

不过热成像传感器因为价格贵的原因,常用于售价高昂的高端车型上,比如说宝马7系、奔驰S级等车型都配备有这项功能,它还有一个颇具科技感的叫法—夜视功能。
“脑子”不见得越多越好
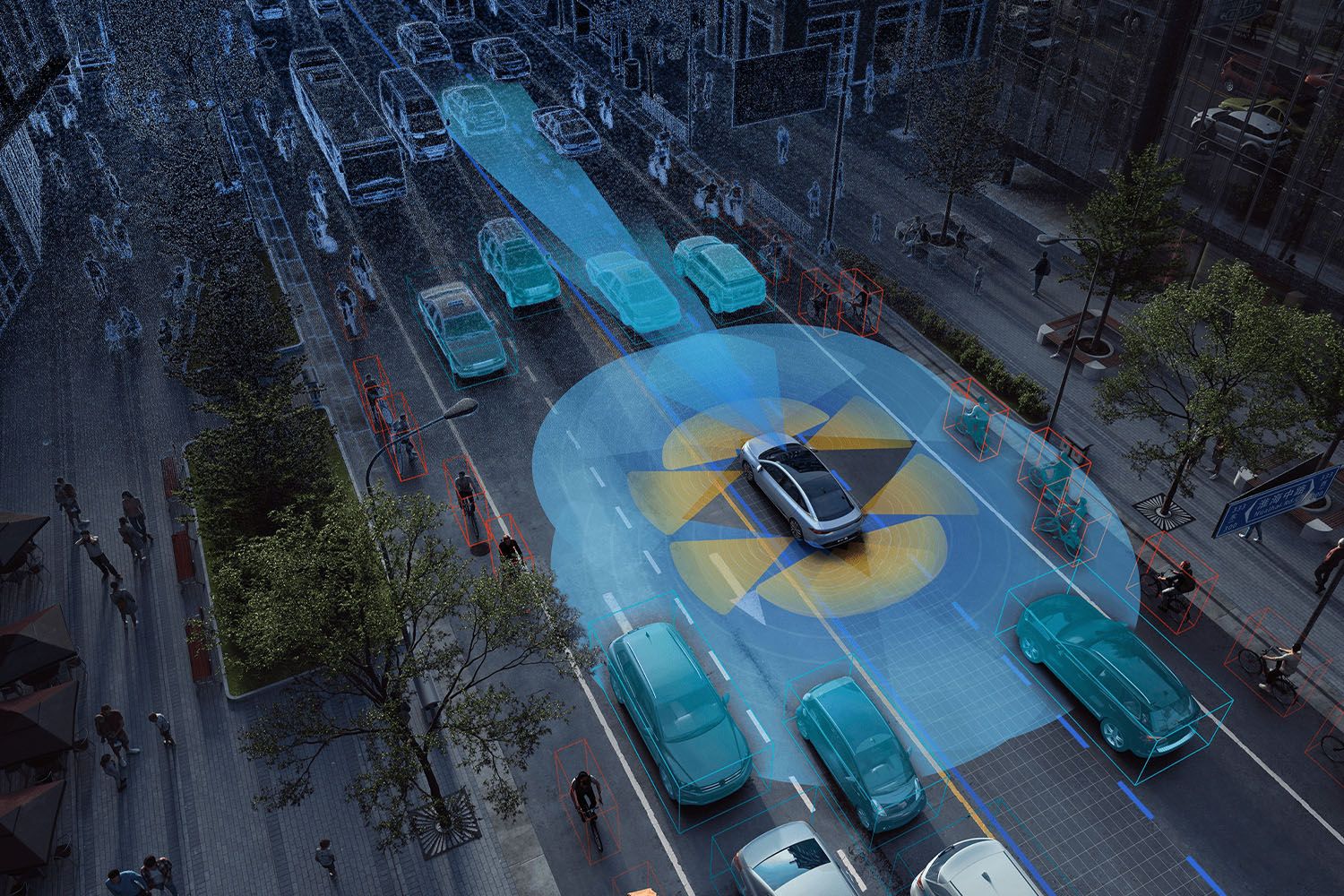
摄像头受光线强度影响较大,激光雷达受雨、雾、沙尘暴等恶劣天气影响较大....每种传感器都有自己的一些弊端,不过在多种传感器的相互补足下,道路上的车辆、行人或障碍物等,它们的位置距离、运动状态,以及颜色、文字等信息,才能被收集并建立出接近现实的信息模型,而分析数据、建立模型的重任则是落在了车规级算力芯片身上。
激光雷达每秒约产生10-70MB左右的数据量,摄像头每秒约产生20-40MB左右的数据量...一辆具备智能驾驶功能的车辆,多个传感器每小时共产生约4TB的数据量。假如一场120分钟的电影占用10GB内存,这就相当于芯片每小时要看约400场电影,而且不仅仅是看,还要分析识别每帧场景中存在的物体,并收集信息建立出等量多的信息模型。
面对如此庞大的任务量,就需要足够快的信息处理能力,衡量算力芯片这种能力强弱的常用单位是TOPS,1TOPS即芯片每秒钟可进行1万亿次的信息处理操作,所以TOPS的数值越大,就说明它的算力越强。
相应地芯片算力越强,它的价格也就越贵,这个道理是显而易见的。但造车是要考虑成本的,所以车企在选用算力芯片时,除非是售价高昂的高端车型,否则很少会使用算力超高的芯片。
原因很简单,假如一辆车在各类传感器收集的数据量固定的情况下,100TOPS的算力芯片就能满足数据的处理需求,如果给这辆车使用一块1000TOPS的算力芯片,造车成本增加了不少,可实际用到的算力却还是那100多TOPS,综合下来非常不划算。

其实各类传感器收集的数据量和算力芯片之间的关系,更像是一种木桶效应,只需要将算力值这块木板和数据任务量形成一个正比,再预留出一部分冗余值即可,没有必要追求超高的算力值,这样既能满足智能驾驶的需求,也能相应的降低造车总成本。
摄像头、激光雷达、毫米波雷达等硬件收集道路信息数据,算力芯片负责分析处理数据包,经过各家车企不同的算法优化后,这些处理好的数据会和车辆的刹车、油门等操作联动,再在高精度地图等配套功能的辅助下,一辆车也就实现了智能驾驶。
写在最后:
智能化已经成为汽车圈的主流进化方向,特别是未来前景一片光明的智能驾驶技术,无论是原本就在汽车赛道中的车企,还是后来涉足如苹果、英伟达、英特尔等科技公司,这些巨头们在智能驾驶领域上的研究,虽然如今还做不到像电影中完全由人工智能操控车辆的完全自动驾驶,可随着时间的推移和技术的更新迭代,相信这一天总会到来的。

 车讯网
车讯网